CUDA 예제 - Reduce 예제 분석
CUDA Reduce 예제 분석
이번 시간에는 수업중에 나온 Reduce 함수에 대한 예제를 분석해보겠다.
보다보면 알겠지만 번호가 큰 함수일 수록 효율적이고 빠른 함수이다.
1. Reduction의 개요
아래의 예시에서는 Reduce라고 되어있지만 사실 같은 것이이다. 동사형이냐 명사형이냐의 차이이다.
이 Reduction은 덧셈에도 쓸 수 있지만 많은 경우에 사용할 수 있는데, 그 예시는 아래와 같다.
- 덧셈
- 곱셈
- 많은 값 중에 가장 큰 값
- 많은 값 중에 가장 작은 값
그외에도 몇가지 더 있다.
이번에 설명할 Reduction은 덧셈에 대한 예시이다.
2. reduce0 예제 분석
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
// device 함수
__global__ void reduce0(float* x, int m) {
int tid = blockDim.x * blockIdx.x + threadIdx.x;
x[tid] += x[tid + m];
}
// host에서 호출, N은 전체 데이터 셋 개수
// h_A => 원본 array 값
float * d_A;
cudaMalloc((void**)&d_A, N * sizeof(float));
cudaMemcpy(d_A,h_A,N * sizeof(float),cudaMemcpyHostToDevice);
for (int m = N / 2; m > 0; m /= 2) {
int threads = (256 < m) ? 256 : m;
int blocks = (m / 256 > 1) ? m / 256 : 1;
reduce0 << < blocks, threads >> > (d_A, m);
}
reduce0 함수의 경우 절반씩 나눠가면서 전반부에 후반부 데이터를 더해간다.
한번에 돌아가는 thread는 m값이 256 보다 크다면 256개, 그보다 작다면 더 작은 크기로 돌아가며, 기본적으로 N값이 2의 배수라는 가정을 두고 돌리는 것이다.
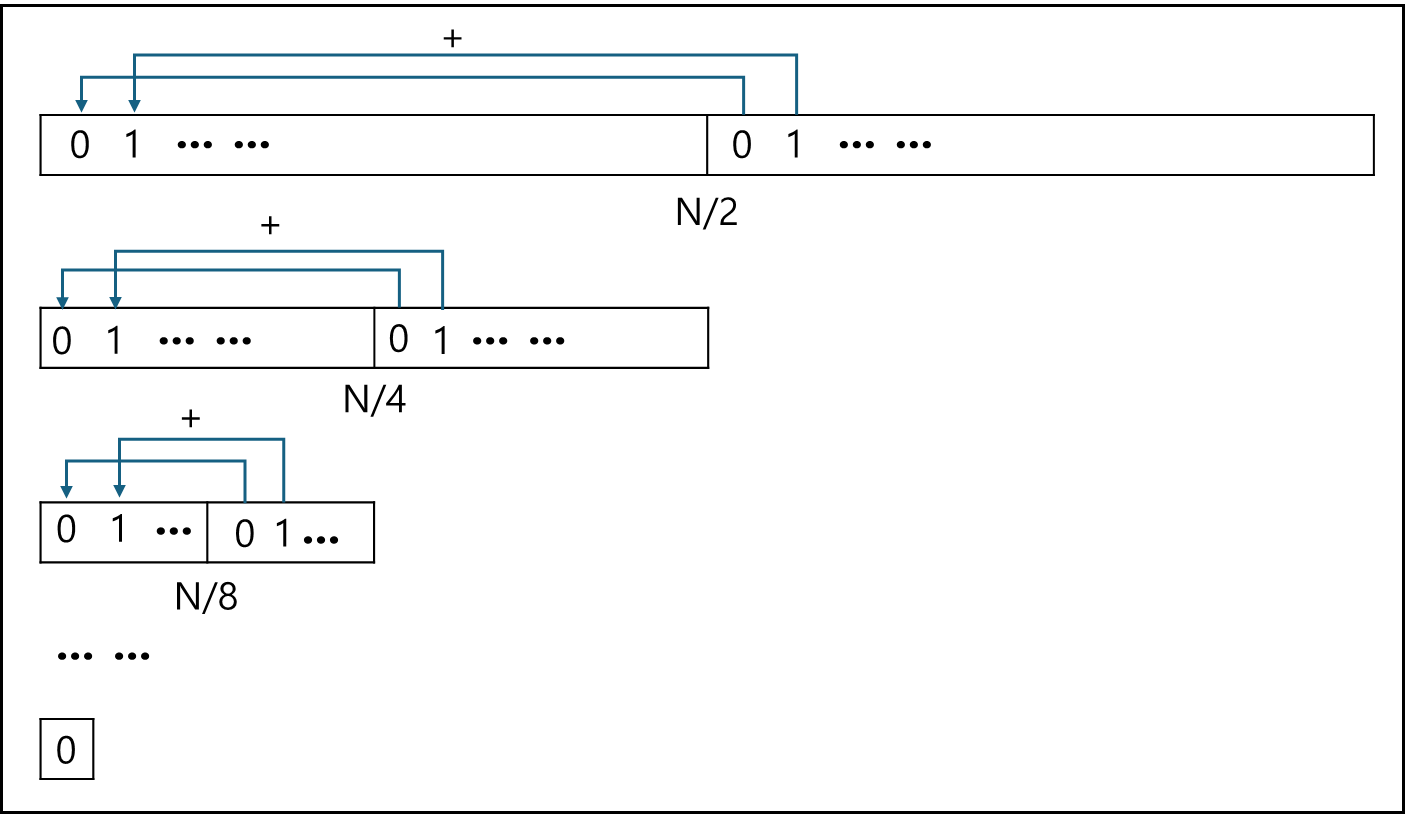
결과값은 d_A[0]에 남게 된다.
3. reduce1 예제 분석
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
// device 함수
__global__ void reduce1(float* x, int N) {
int tid = blockDim.x * blockIdx.x + threadIdx.x;
float tsum = 0.0f;
int stride = gridDim.x * blockDim.x;
for (int k = tid; k < N; k += stride)
tsum += x[k];
x[tid] = tsum;
}
// host에서 호출, N은 실 데이터 배열 길이
// h_A => 원본 array 값
int blocks = 288; // SM의 배수
int threads = 256;
float * d_A;
cudaMalloc((void**)&d_A, N * sizeof(float));
cudaMemcpy(d_A,h_A,N * sizeof(float),cudaMemcpyHostToDevice);
reduce1 << < blocks, threads >> > (d_A, N);
reduce1 << < 1, threads >> > (d_A, blocks * threads);
reduce1 << < 1, 1 >> > (d_A, threads);
threads * blocks 개수가 전체 N개보다 작고 N개의 배수의 형태로 운용한다.
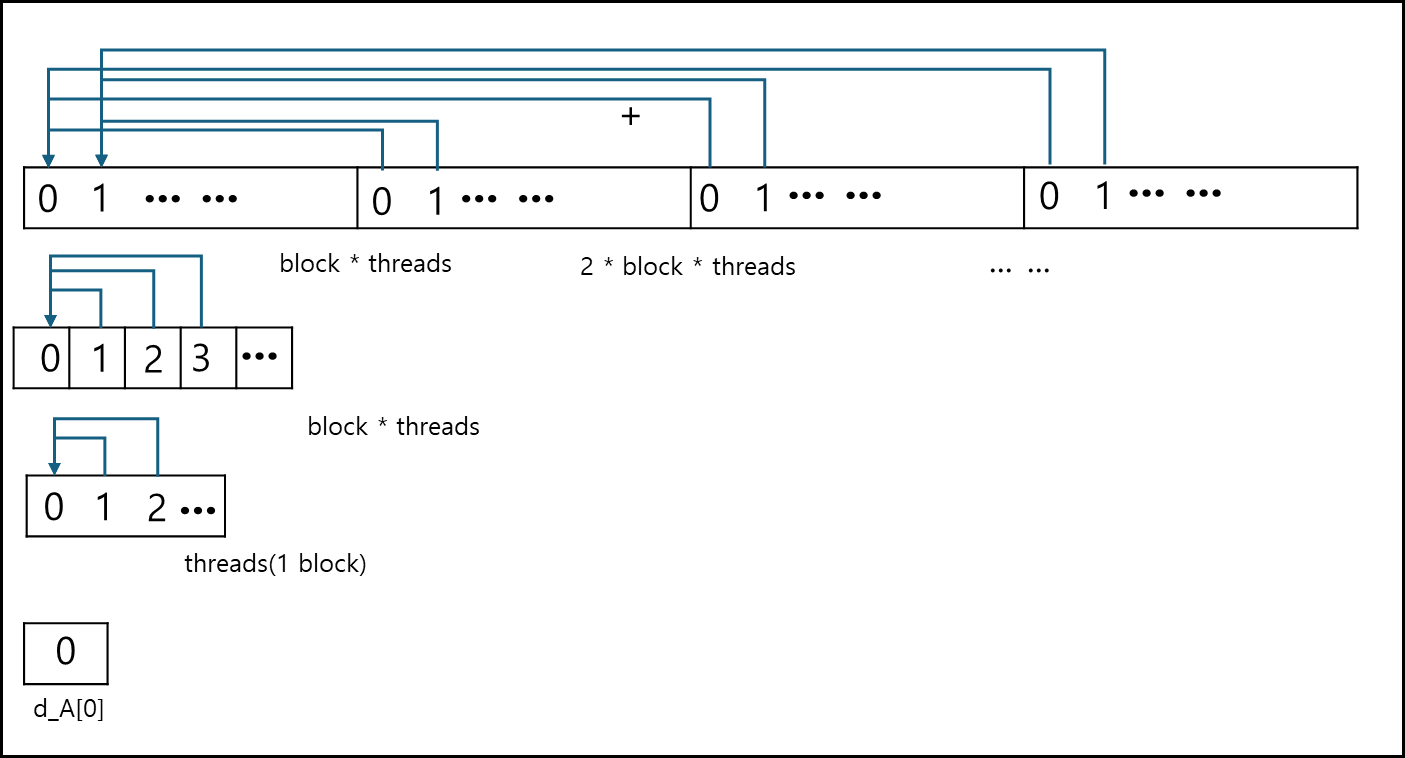
threads * blocks를 stride로 잡고, stride 기준으로 데이터를 갖고와서 첫번째 stride 범위안의 메모리에 값을 더한다.
이후 두번째 커널에서는 threads * blocks 범위의 데이터를 한 개의 block안에 더한다. 이후 세번째 커널에는 한 개의 block에 있는 모든 값을 더해서 block의 제일 첫번째 Index에 넣는다.
위 함수에서 결과값은 d_A[0]에 저장된다.
4. reduce2 예제 분석
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
// device 함수
__global__ void reduce2(float *y, float *x, int N) {
extern __shared__ float tsum[]; // dynamic shared memory
int id = threadIdx.x;
int tid = blockDim.x * blockIdx.x + threadIdx.x;
int stride = gridDim.x * blockDim.x;
tsum[id] = 0.0f;
for (int k = tid; k < N; k += stride) tsum[id] += x[k];
__syncthreads();
for (int k = blockDim.x/2; k > 0; k /= 2){ // power of 2 reduction loop
if (id < k) tsum[id] += tsum[id + k];
__syncthreads();
}
if (id == 0) y[blockIdx.x] = tsum[0]; // store one value per block
}
// host에서 호출
int blocks = 256; // power of 2
int threads = 256;
// h_A => 원본 array 값
float * d_A;
float * d_B;
cudaMalloc((void**)&d_A, N * sizeof(float));
cudaMemcpy(d_A,h_A,N * sizeof(float),cudaMemcpyHostToDevice);
cudaMalloc((void**)&d_B, N * sizeof(float));
reduce2 << < blocks, threads, threads * sizeof(float) >> > (d_B, d_A, N);
reduce2 << < 1, blocks, blocks * sizeof(float) >> > (d_A, d_B, blocks);
위 코드는 shared_memory를 사용한다.
기본적으로 위 방식도 stride를 사용하되, stride 밖의 값은 shared_memory를 이용하여 값을 더하고
stride 범위 안의 값은 2로 나눠가며 뒤의 값을 앞의 메모리에 더해가는 방식이다.
첫번째 커널에서는 전체 값이 한 개의 블록 사이즈로 줄어들고 두번째 커널에서는 한 개의 블록사이즈가 한 값으로 줄어들어서 결과를 반환한다.
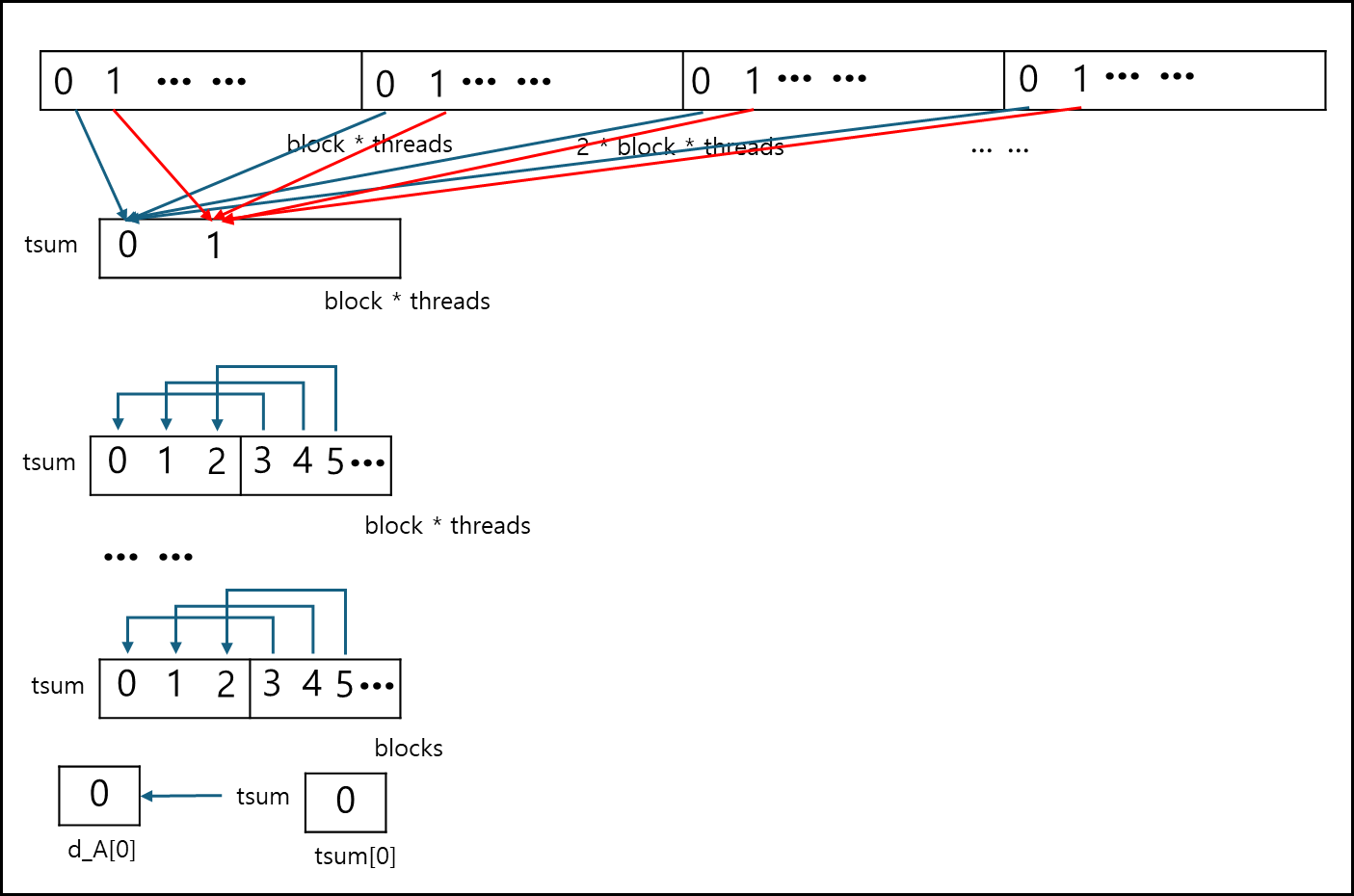
shared_memory를 썼다는 점에서 reduce0와 reduce1 방식을 mix 했다고 볼 수 있다.
위 함수 역시 d_A[0]에 결과값이 저장된다.
5. reduce3 예제 분석
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
// device 함수
// device only function smallest power of 2 >= n
__device__ int pow2ceil(int n) {
int pow2 = 1 << (31 - __clz(n));
if (n > pow2) pow2 = (pow2 << 1);
return pow2;
}
__global__ void reduce3(float* y, float* x, int N) {
extern __shared__ float tsum[];
int id = threadIdx.x;
int tid = blockDim.x * blockIdx.x + threadIdx.x;
int stride = gridDim.x * blockDim.x;
tsum[id] = 0.0f;
for (int k = tid; k < N; k += stride) tsum[id] += x[k];
__syncthreads();
int block2 = pow2ceil(blockDim.x); // next higher power of 2
for (int k = block2 / 2; k > 0; k >>= 1) { // power of 2 reduction loop
if (id < k && id + k < blockDim.x) tsum[id] += tsum[id + k];
__syncthreads();
}
if (id == 0) y[blockIdx.x] = tsum[0]; // store one value per block
}
//host에서 호출
int blocks = 270; // may not be a power of 2
int threads = 256;
// h_A => 원본 array 값
float * d_A;
float * d_B;
cudaMalloc((void**)&d_A, N * sizeof(float));
cudaMemcpy(d_A,h_A,N * sizeof(float),cudaMemcpyHostToDevice);
cudaMalloc((void**)&d_B, N * sizeof(float));
reduce3 << < blocks, threads, threads * sizeof(float) >> > (d_B, d_A, N);
reduce3 << < 1, blocks, blocks * sizeof(float) >> > (d_A, d_B, blocks);
pow2ceil 함수는 N 값보다 바로 다음 큰 2의 승수 값을 반환하는 함수이다. 이 함수를 이용하여 reduce2와 동일하게 절반씩 나눠가면서 값을 더한다.
하지만 여기서 다른 점은 block의 개수를 SM의 배수로 잡는 다는 점이다. 성능은 크게 차이가 없긴하다.
6. reduce4 예제 분석
1) 코드
일단은 Reduce4 함수에 대한 코드이다.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
__global__ void reduce4(float* y, float* x, int N) {
extern __shared__ float tsum[];
int id = threadIdx.x;
int tid = blockDim.x * blockIdx.x + threadIdx.x;
int stride = gridDim.x * blockDim.x;
tsum[id] = 0.0f;
for (int k = tid; k < N; k += stride)
tsum[id] += x[k];
__syncthreads();
// for 256 <= blockDim.x <= 512
if (id < 256 && id + 256 < blockDim.x) tsum[id] += tsum[id + 256]; __syncthreads();
if (id < 128) tsum[id] += tsum[id + 128]; __syncthreads();
if (id < 64) tsum[id] += tsum[id + 64]; __syncthreads();
if (id < 32) tsum[id] += tsum[id + 32]; __syncthreads();
// warp 0 only from here
if (id < 16) tsum[id] += tsum[id + 16]; __syncwarp();
if (id < 8) tsum[id] += tsum[id + 8]; __syncwarp();
if (id < 4) tsum[id] += tsum[id + 4]; __syncwarp();
if (id < 2) tsum[id] += tsum[id + 2]; __syncwarp();
if (id == 0)
y[blockIdx.x] = tsum[0] + tsum[1];
}
위 코드는 아래와 같은 형태로 main에서 호출된다.
1
reduce4 <<< blocks, threads, threads * sizeof(float) >>> (d_B, d_A, N);
위 예제 코드를 분석 파트에서 하나씩 뜯어보겠다.
2) 분석
먼저 main 함수에서 호출되는 형태를 보자.
1
reduce4 <<< blocks, threads, threads * sizeof(float) >>> (d_B, d_A, N);
reduce4는 함수이름이고, «< 다음에 순서대로 블록 개수, 스레드 개수, 스레드 개수 곱하기 float의 크기라고 생각하면된다. 그리고 끝에 d_B, d_A, N은 함수 선언간 정의된 인자들이다.
중간에 꺽쇠 세개 쌍으로 이루어진 것들은 원래 c++에 없는 문법이며 CUDA 컴파일러에서 처리해주는 문법이라고 생각하면 된다.
함수 첫부분 __global__은 cpu가 GPU 함수인 커널을 호출할때 쓰는 지시자라고 생각하면 된다. 이후 인자로 float* y, float* x, int N은 함수 »> 뒤에 들어간 인자에 Mapping 된다.
처음에 나오는 shared float tsum[]; VRAM에 tsum 영역을 잡는데 필요한 양은 아까 threads * sizeof(float)로 받은 사이즈이다.
1
2
3
4
int id = threadIdx.x;
int tid = blockDim.x * blockIdx.x + threadIdx.x;
int stride = gridDim.x * blockDim.x;
tsum[id] = 0.0f;
id는 해당 스레드가 스레드 블럭에서 몇번째인지를 나타내고, tid는 Grid에서 몇번째인지를 나타내며 stride는 해당 Grid가 몇 개의 스레드로 이루어져있는지 나타낸다. 그리고 tsum[id]는 스레드 블럭에서 id 번째의 합을 초기화 시킨다.
1
2
3
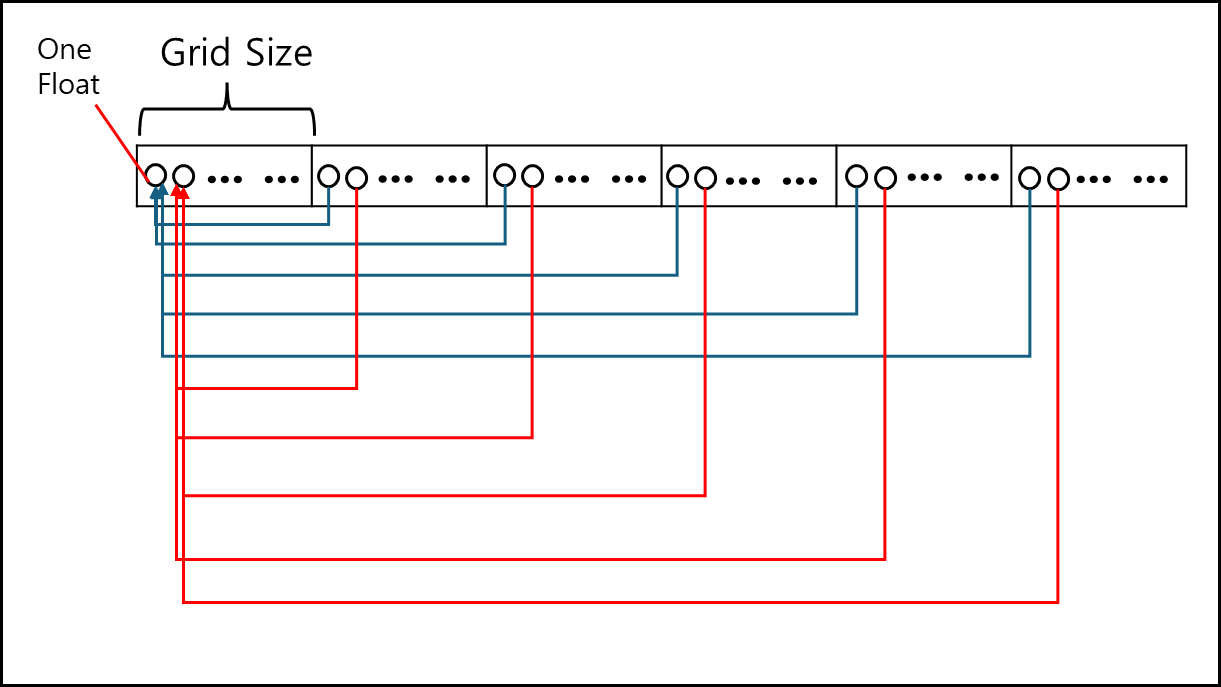
for (int k = tid; k < N; k += stride)
tsum[id] += x[k];
__syncthreads();
stride 값만큼 더하며 tsum 배열에 id 번째에 값을 더해준다. 위 코드를 아래와 같이 나타낼 수 있다.
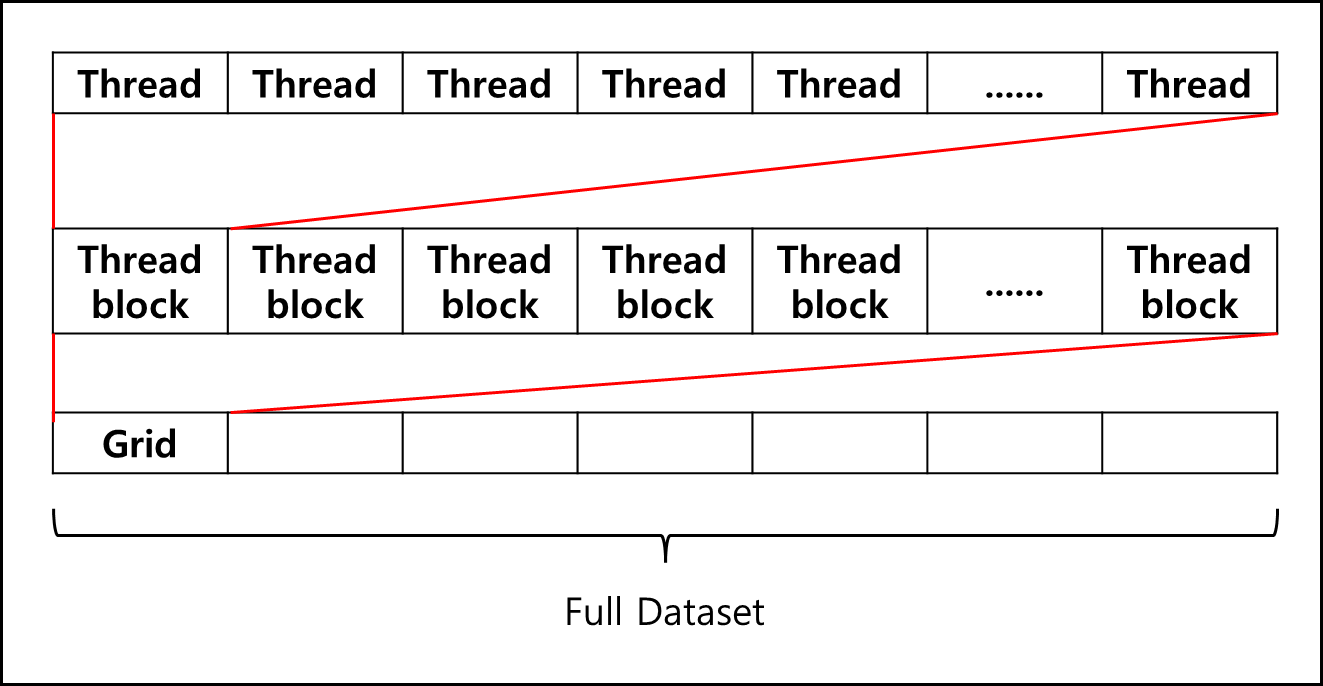
즉, 하나의 그리드와 동일한 사이즈로 매핑된 Full Dataset 일부에 나머지 값들을 모두 더하는 것이다.
그러고 나온 __syncthreads 함수는 ThreadBlock 내에서 모든 Thread를 동기화해주기 위해 쓰는 것이다.
이게 없으면 전체가 다 더해지지 않은 상태에서 다음 코드로 넘어가버리기 때문에 이상한 값이 나온다.
1
2
3
4
5
6
7
8
9
10
11
12
13
// for 256 <= blockDim.x <= 512
if (id < 256 && id + 256 < blockDim.x) tsum[id] += tsum[id + 256]; __syncthreads();
if (id < 128) tsum[id] += tsum[id + 128]; __syncthreads();
if (id < 64) tsum[id] += tsum[id + 64]; __syncthreads();
if (id < 32) tsum[id] += tsum[id + 32]; __syncthreads();
// warp 0 only from here
if (id < 16) tsum[id] += tsum[id + 16]; __syncwarp();
if (id < 8) tsum[id] += tsum[id + 8]; __syncwarp();
if (id < 4) tsum[id] += tsum[id + 4]; __syncwarp();
if (id < 2) tsum[id] += tsum[id + 2]; __syncwarp();
if (id == 0)
y[blockIdx.x] = tsum[0] + tsum[1];
이후 코드의 경우에는 간단한데, 해당 Grid를 절반 단위로 잘라서 뒤 절반을 앞 절반 위치에 더해주는 형태이다.
각 Thread가 잡고 계산하기 때문에 매우 속도가 따르지만, 이 역시 Sync를 맞추기 위해서 __syncthreads 함수는 잊으면 안된다. 절반 씩 나눠가면서 더하다가 32이하로 되는경우 __syncwarp 함수로 대체되는데 32 이하의 경우 한 개의 Warp로만 구동되기 때문에 __syncthreads 함수보다 더 시간적 비용이 싼 __syncwarp 함수를 쓰는 것이다.
참고문헌
- 서강대학교 임인성 교수님 - 기초 GPU 프로그래밍 수업 자료